3D Kinematic Analysis of the Ollie Maneuver on the Skateboard
Luana Bianchini Wood
Ana Oliveira
Karini Santos
André Rodacki
Jerusa Lara
*Correspondencia: Ana Oliveira cpo.ana@hotmail.com
Citación
Bianchini Wood, L., Oliveira, A., Santos, K., Rodacki, A., & Lara, J. (2020). 3D Kinematic Analysis of the Ollie Maneuver on the Skateboard. Apunts. Educación Física y Deportes, 141, 87-91. https://doi.org/10.5672/apunts.2014-0983.es.(2020/3).141.10
Abstract
This study aims to analyze the tridimensional kinematics of the ollie maneuver on the skateboard and to compare static and dynamic maneuver performance, i.e., without and with a previous row, respectively. Six male participants were analyzed. Thirty-four reflective markers were placed on the skateboarder’s body and four reflective markers on the board. The tridimensional analysis was captured by eleven cameras (100 Hz) (Vicon® system). The analysis of the ollie skateboard maneuver was performed in two different ways: a) without (static maneuver) and b) with (dynamic maneuver) a previous row. The joint angles (ankle, knee and hip), during maximal height center of mass of participants and the skateboard, were compared using the Student’s T-test. The correlation between the center of mass of the participant and the skateboard was calculated using the Pearson Correlation. No significant differences were observed in the maximum height of the joint angles and centers of mass of the participants and the skateboard. The maximal height of the participant’s and the skateboard’s center of mass did not present a significant correlation. The results showed that there is no difference between performing the ollie skateboard maneuver with (static) or without (dynamic) a previous row. However, training to increase the height and improve the performance of the maneuver in general is essential for the skateboarder to achieve a higher score and a greater likelihood of success in sports competitions.
Introduction
Skateboard or skateboarding is a radical sport that consists of the practitioners moving and performing maneuvers while balancing on the skateboard. The skateboard is composed of a plate made of different layers of woods, called shapes, two pairs of wheels and two trucks which join the wheels to the shape (Silva, 2006). This sport will be included in the Tokyo Olympics in 2021. Skateboarding has approximately 8.5 million practitioners in Brazil, according to a survey commissioned by the Brazilian Skateboard Confederation in 2015. One important feature of the sport, particularly street skateboarding (one of the variations of the modality), is to overcome obstacles, and height of maneuver is of the utmost importance in improving performance.
One essential maneuver that constitutes the basis for the other maneuvers executed in the modality (Tesler, 2000; Meira et al., 2003 cited by Silva, 2006) is the ollie, characterized by a jump, in the course of which both skateboard and athlete ascend and return to the ground in a continuous movement (Bridgman & Collins, 1992 apud Silva, 2006). Thus, improving performance in the ollie maneuver in terms of height can lead to an improvement in the maximum height achieved in other maneuvers (Silva, 2006).
The execution of the ollie maneuver can be influenced by the skateboarder’s motor abilities, such as balance, agility, flexibility, coordination, muscular resistance and other psychological and physiological aspects. It is also emphasized that motor characteristics, such as acceleration in the lead-up to the jump maneuver, can also influence performance (Santos, 2008). To maximize maneuver height, the practitioner’s arms play an important role in generating balance and in producing displacement of the center of mass in the vertical direction (Meira et al., 2003). This is very important, since maneuver height is a preponderant factor in the sport for overcoming obstacles, and the ollie is the most basic maneuver in street skateboarding.
The literature contains studies involving the development of specific questionnaires for skateboarders (Rodríguez-Rivadulla et al., 2019), and the kinetics of skateboarding have been analyzed in order to understand injures (Determan et al., 2010), although performance-related kinematic analyses are underrepresented in the scientific literature. However, since this type of analysis contributes to the development of the sport, the aim of this study is to analyze and compare the kinematics of the ollie maneuver in static and movement situations.
Methods
Six male participants (23.3 ± 4.2 years), who had been skateboarders for 9.0 (± 4.2) years, with experience in the ollie dynamic and static maneuver, took part in this study.
Anthropometric measurements of leg length and bone diameter measurements of the knee, ankle, hand, wrist and elbow were taken, and 34 reflective markers (Full Body Sacro Plug-in-Gait biomechanical protocol) were placed on the skateboarders’ body and four markers on the skateboard shape (Figure 1). The tridimensional analysis was captured by eleven infrared optical capture cameras of the Vicon® system (Denver, USA), with 100 Hz acquisition frequency, synchronized from one MX Control (Giganet) unit. A biomechanical model for skateboards was created in the Vicon® for the calculation of the center of mass (COM).

Position of the reflective markers on the skateboard.

For the purpose of data collection, the participant performed three valid static map maneuvers. Attempts were deemed invalid when the participant did not complete the maneuver phases, such as failing to finish the landing on the skateboard, or when the system was unable to capture any of the points marked on the subject’s body or on the skateboard used in the biomechanical protocol. Subsequently, the participant was instructed to perform the dynamic maneuver, where the paddle preceded the ollie. The «pop» of the maneuver was to be executed on top of a mark, placed 3 meters after the start of a 10-meter-long walkway. Three valid attempts were also considered for the dynamic maneuver.
Graphs with the trajectory of the skateboard and the participants’ center of mass (COM) and the right and left hip, knee and ankle angles were used to describe the static and dynamic maneuver movement. A comparison of both the participant’s and the skateboard’s COM height was performed in the static and the dynamic maneuver, with and without paddling, for which purpose Cohen’s t and d tests were performed.
To calculate the skateboard’s COM, a routine developed in the MatLab® environment was used, considering the shape as a geometric solid, and the center of the main diagonal was translated to the wheel axis. The skateboarder’s center of mass was also calculated by a routine created in MatLab®.
Descriptive statistics (mean and standard deviation) were used for bilateral hip, knee and ankle angles in both of the ways in which the ollie maneuver was performed. In addition, the paired T-test was carried out to compare differences between variables. The Cohen’s deffect size was calculated to compare the technical execution of the maneuver.
The respective correlations of the COM of the skateboard, the participants and their joint angles (left, right and left hip, knee and ankle) were tested with the Pearson Correlation Coefficient for both maneuver situations, i.e. static and dynamic. Statistical tests were performed in the SPSS software and the significance level set was p ≤0.05.
Results
Table 1 presents the height of the center of mass and joint angles during the maneuver. The participant’s COM reached an average height of 0.18 (± 0.07) m during the static maneuver and 0.18 (± 0.06) m during the dynamic maneuver. The skateboard’s COM did not present any differences between static and dynamic maneuvers, and the skateboard COM reached the height of 0.24 (± 0.01) m. Therefore, there is no significant difference in the maximum height of centers of mass when the maneuver is performed statically or dynamically.
Table 1
Participant’s and skateboard’s height center of mass, joint angles (right and left) at the maximum instant of the center of mass of the participant and the skateboard and during static (no-row) and dynamic (row-on) situation in the ollie maneuver
No significant differences were observed between maneuver styles (static and dynamic) when the participant’s and the skateboard’s COM were considered. However, a large effect size was observed in right ankle angle during the maximum height of both COM (0.81 and 0.82 m) and in the right knee at the skateboard’s maximum COM (0.87 m).
During the static maneuver, the left knee angle (which is forward on the skateboard) was highly correlated (r = 0.85 p = 0.03) with the skateboard’s maximum COM height, hence the greater the flexion in the front knee, the higher the skateboard COM height. In the dynamic maneuver, the left knee angle at the maximum height instant of the participants (r = 0.98 p = 0.00) and of the skateboard COM (r = 0.85 p = 0.03) presented a high correlation with the maximum skateboard height. In the other words, the greater the knee flexion angle the greater the skateboard height obtained. The left ankle angle (in plantar flexion) at the maximum height instant of the center of mass of the participant (r = -0.91 p = 0.00) and the skateboard (r = -0.83 p = 0.00) presented a high inverse correlation with the maximum skateboard height, i.e., the greater the plantar flexion angle the lower the skateboard height obtained. Ideally, the front ankle was in dorsiflexion.
Participant and skateboard COM trajectory during the dynamic ollie maneuver and joint angles (hip, knee and ankle) of the right and left limbs are displayed in Figure 3. During both maneuvers, the athlete reached the maximum skateboard height before reaching the maximum body height (COM).
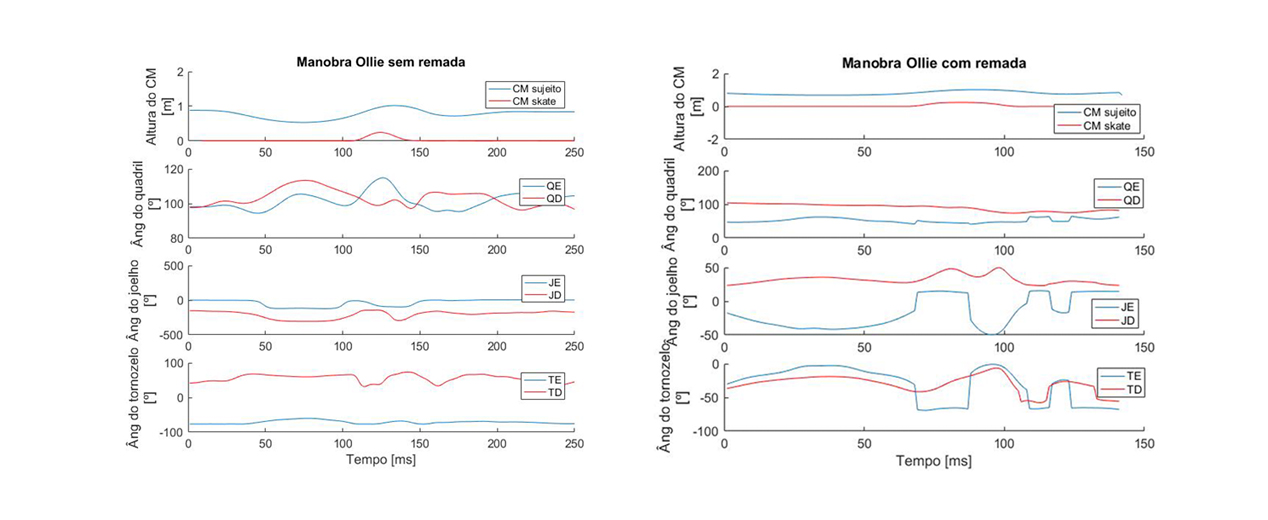
Participant COM trajectory and skateboard during the dynamic ollie maneuver and joint angles (hip, knee and ankle) of the right and left limbs
Discussion
This study aimed to analyze and compare static and dynamic ollie maneuver kinematics. The results tally with the literature pertaining to COM height. The skateboard’s COM rises 0.06 m more than the skateboarder’s COM compared to the study by Jr Bridgman & Collins (1992), who found that the skateboarder’s COM was 55% higher than that the skateboard’s. This may be related to the fact that the score is awarded according to skateboard height or to the extent that high obstacles are overcome.
Similarly, no correlation was observed between the participant’s COM and the skateboard’s COM, and although the skateboarder can no longer raise their COM, they can flex their lower limbs, bringing the skateboard closer to their body and increasing their COM, which may account for the absence of any correlation between the participant’s and the skateboard’s COM. The slight plantar flexion performed during the squat can be related to the instability of the skateboard’s shape. In fact, Kremnev & Kuleshov (n.d.) point out that the skateboarder may present instability, although the feet remain on the skateboard, the body weight is shifted mostly to the toes, while shortening-stretching the lower limb muscles.
The absence of an ankle and hip trajectory pattern in both maneuvers may be linked to the COM adjustment the skateboarder needs to perform to maintain balance. Balance adjustment is performed through the integration of the sensory motor system, which generates different muscle responses to correct for possible postural deviations (Lemos; Teixeira, 2009). Bridgman & Collins (1992) reported a parabolic trajectory of skateboarders’ center of mass, as well as the extension of the lower limbs during the ascent movement, followed by flexion and a further extension to a controlled landing, as observed in this study.
In the study by Bridgman & Collins (1992), the participants’ and skateboard’s center of mass follow similar trajectories, although body segments present complex trajectories without a specific pattern. These findings are similar to the results obtained in this study. Extensor muscles will increase strength, and consequently the height of the maneuver, as seen with Silva (2006), in which 50.6% of ollie jump variance is accounted for by the variable knee extensor strength of the knee-dominant limb.
Conclusions
The results show that there is no significant difference between performing the static and dynamic skateboard ollie maneuver. The maximum skateboard and skateboarder COM heights reached were close when compared to the maneuver conditions.
However, some angular variations were observed during the dynamic maneuver in the knee and ankle, indicating that these angular variations may influence the height of the center of mass reached by the skateboard during the maneuver.
Contribution
LUANA B. WOOD – Data collection and processing; text writing;
ANA CAROLINA P. de OLIVEIRA – Text writing and correction;
KARINI BORGES – Text correction and language proofing;
ANDRÉ L. F. RODACKI – Text correction and language proofing;
JERUSA P.R.LARA- Guidance on data collection and processing, text writing and correction.
Referencias
[1] Determan, J. J., Frederick, E. C., Cox, J. S., & Nevitt, M. N. (2010). High impact forces inskateboarding landings affected by landing outcome.Footwear Science, 2(3), 159–170. doi.org/10.1080/19424280.2010.525534
[2] Jr Bridgman, S., & Collins, D. F. (1992). Human body motion in an ollie. 498. doi.org/10.1119/1.2343617
[3] Kremnev, A. V, & Kuleshov, A. S. (n.d.). Dynamics and Stability of the Simplest Skateboard Model.
[4] Lemos, L.F.C; Teixeira, C. M. C. (2009). Uma revisão sobre centro de gravidade e equilíbrio corporal A review about center of gravity and body balance. Revista Brasileira de Ciencia e Movimento, 17(4),83–90.
[5] Rodríguez-Rivadulla, A., Saavedra-García, M., & Arriaza-Loureda, R. (2019). Creation and Validation of a Questionnaire on Sport Habits and Injuries in Skateboarding. Apunts. Educación Física y Deportes, 135, 36-47. doi.org/10.5672/apunts.2014-0983.es.(2019/1).135.0303
[6] SANTOS, M. M. . (2008). Efeitos do feedback extrinseco na performance da manobra ollie em skatistas do municipio de irati-pr.
[7] SILVA, R. E. (2006). Contribuição da força e potência dos membros inferiores na performance da manobra “ollie” do skate.
[8] Tesler, P. Asphalt acrobats. (2000) Scientific American Presents, 68-73.
ISSN: 2014-0983
Recibido: 6 de diciembre de 2019
Aceptado: 18 de marzo de 2020
Publicado: 1 de julio de 2020
Editado por: © Generalitat de Catalunya Departament de la Presidència Institut Nacional d’Educació Física de Catalunya (INEFC)
© Copyright Generalitat de Catalunya (INEFC). Este artículo está disponible en la url https://www.revista-apunts.com/ Este trabajo está bajo la licencia Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License. Las imágenes u otro material de terceros en este artículo se incluyen en la licencia Creative Commons del artículo, a menos que se indique lo contrario en la línea de crédito. Si el material no está incluido en la licencia Creative Commons, los usuarios deberán obtener el permiso del titular de la licencia para reproducir el material. Para ver una copia de esta licencia, visite https://creativecommons.org/licenses/by-nc-nd/4.0/deed.es_ES


